
辽宁搬运机器人是一种自动化的机器人,具有以下操作步骤:
确定搬运任务:首先,需要确定搬运任务的内容和要求,例如搬运的物品的重量、体积、形状等。
设定搬运机器人:接着,需要根据搬运任务的要求,设定搬运机器人的相关参数,例如运动范围、速度、加速度等。
安装搬运机器人:然后,需要根据搬运任务的要求,安装搬运机器人的相关设备,例如搬运臂、传感器等。
控制搬运机器人:接下来,需要通过控制搬运机器人的运动,实现搬运任务。可以通过编程或者人工智能技术,实现自动控制搬运机器人的运动。
检查搬运效果:,需要检查搬运效果,确认搬运任务是否达到预期的要求。
总之,辽宁搬运机器人的操作步骤包括确定搬运任务、设定搬运机器人、安装搬运机器人、控制搬运机器人和检查搬运效果等。需要根据搬运任务的要求,灵活运用搬运机器人的各种功能,实现、安全、可靠的搬运任务。








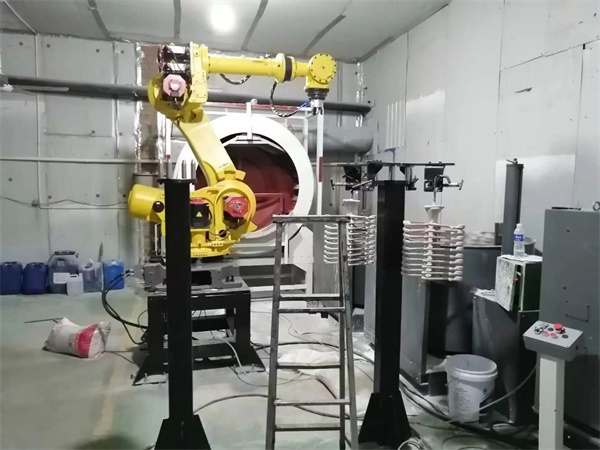
北京物料搬运机器人是一种自动化、智能化的机器人设备,用于搬运物料,提高生产效率和质量。其主要特点包括:
1.率:搬运机器人可以在高速状态下搬运物料,效率远高于人工搬运。
2.高精度:搬运机器人可以实现高精度搬运,避免物料损坏和偏移。
3.高可靠性:搬运机器人采用先进的控制系统和传感器,可靠性高。
4.多功能性:搬运机器人可用于多种物料的搬运,例如钢铁、木材、纸张等。
5.人性化设计:搬运机器人设计符合人体工程学,操作简单舒适。
北京物料搬运机器人广泛应用于工业、商业、等领域,为企业提供了、智能、可靠的物料搬运解决方案。

北京搬运机器人是一种自动化设备,通过程序和机械手臂实现物品的自动搬运。其操作方法如下:
1.编程:根据搬运需求,编写程序代码,机器人的运动轨迹、搬运速度、力度等参数。
2.安装机器人:将机器人按照编程指令安装在搬运位置上,连接电源和通讯设备。
3.启动机器人:打开电源开关,机器人开始进行初始化设置,准备搬运作业。
4.操作机器人:通过控制器或遥控器,输入指令,控制机器人的运动和力度。同时,机器人也会根据环境和物品的特征进行避障和适应性调整。
5.检查和调整:搬运作业完成后,检查机器人的表现,如搬运效率、精度、安全性等,并进行必要的调整和维护。
总之,北京搬运机器人的操作需要在程序和机械手臂的配合下,通过人工智能和自动化技术来实现物品的、安全、搬运。

您好,欢迎莅临海拓自动化,欢迎咨询...